WORK実例
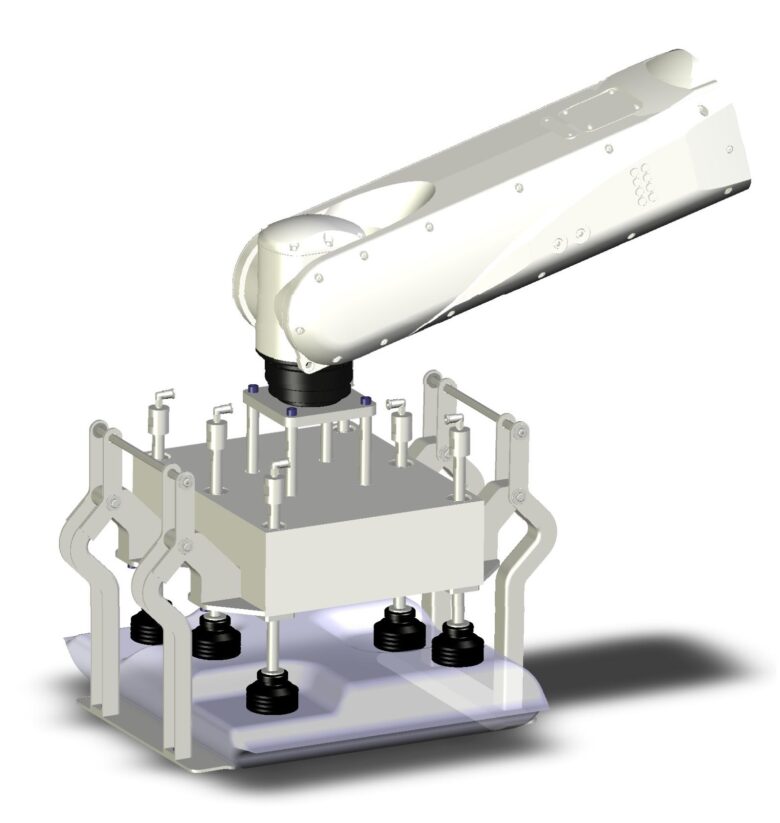
袋吸着ハンド装置
【お客様からのご相談内容
【お客様の業種】
機械メーカー
【お客様の課題】
凸凹のある製品が入った袋では、均一な面がないため、製品が入った袋を吸着又は把持するためのハンド装置のご依頼がありました。
<吸着・把持方法>
製品の入った袋に吸着ハンドを押し付けて吸着をします。
袋に押し付けることで凸凹の段差は、倣いガイドで吸収しガイドをロックします。
吸着面の不整はベローズタイプの吸着パッドで吸収する構造となっております。
<仕様>
製品の入った袋:約5kg ハンド装置質量:5kg
ロボット:可搬12kg以上の6軸ロボット