WORK実例
インゴット把持ハンド装置
【お客様からのご相談内容】
【お客様の業種】
半導体メーカー
【お客様の課題】
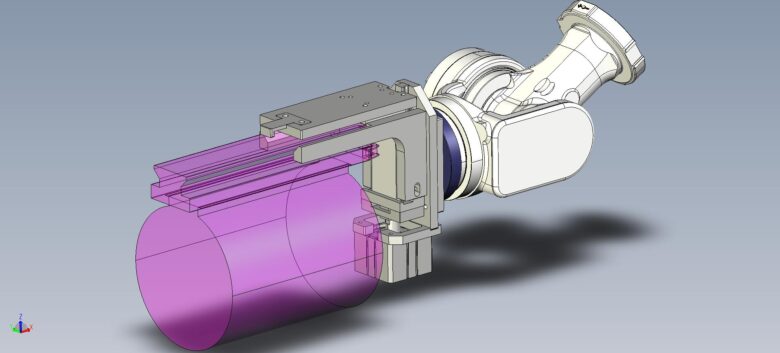
レールに収まっているインゴット製品を取り出して、加工機械に搬送する為のハンド装置の
ご依頼がありました。
<把持方法>
レールに収まっているインゴット製品を、インゴット製品に取付いているフックを使用して
インゴット製品を、レールの半分まで引出します。
インゴット製品のレールの溝にハンド装置のレールを挿入して、製品をクランプします。
ハンド装置でレールからインゴット製品を取出しで、加工機械に搬送する構造となっております。
<仕様>
インゴット製品:90kg ハンド装置質量:34kg
ロボット:可搬160kg以上の6軸ロボット